PID
写在前面
理论内容参考必修内容从不懂到会用!PID从理论到实践~
如果你在学习之后还是不能马上上手PID调参,可以参考这份文档。
首先声明,PID调参是一个吃经验的事情,具体操作难以使用语言描述清楚。如果有看不懂的地方请尽情询问 有调参经验 的小登和老登。笔者尽量将其写的清楚一些,若有无法理解的点,请反馈。
串级PID一般来说一共有11个参数,包含 内环/速度环 和 外环/位置环 的 P、I、D、output limit、I output limit,还有滤波系数。
#define YAW_OUTER_KP
#define YAW_OUTER_KI
#define YAW_OUTER_KD
#define YAW_OUTER_OUT_LIMIT
#define YAW_OUTER_IOUT_LIMIT
#define YAW_INNER_KP
#define YAW_INNER_KI
#define YAW_INNER_KD
#define YAW_INNER_OUT_LIMIT
#define YAW_INNER_IOUT_LIMIT
#define YAW_INNER_LOWPASS_FILTER_PARA
通常来说,P的大小对应数据运动幅度大小,I是微分累计,D用于消抖。
经验告诉我们调车过程中一般很少会加I,D一般都给的很小,P可以给的比较大。低通滤波为1则没开滤波,一般开到0.8就不小了。
重负载的PID会比轻负载好调很多,新手建议从重负载开始。
如果你的PID参数过于激进,请注意收一收。
PID调参数值的确定可以借鉴数学的二分法,就比如说调P的时候,Kp为5时不动,为6时疯狂转动,那么下一步我们就应该取5.5(注意精度),这样调参能够最快找出合适的值
值得注意的是,PID各个参数的大小是相对的。比如3508的 P上限在16000,给到大几千的数据较为正常;而4310的单位为弧度制,P经常给到比较小的十位数甚至个位数。
串级PID精细调参可以大致分为两步,把脉粗调和vofa精调。
类比于显微镜,找到目标微生物后需要先调节粗准焦螺旋调节合适的距离,然后再使用细准焦螺旋调节清晰度。
把脉调参先调节内外环PID到一个合适的范围,再使用vofa数据将PID输出数据更加稳定。
但有的电机位置不好,比如串级摩擦轮这些东西,把脉会出现“生命危险”。只能使用vofa调参。
古法把脉调参法
这个方法适用于初步粗调参。
先调内环
- 将外环位置限制住
对应操作:将外环P给极小,再将外环output limit给到极小。如果外环没有限制住会有抖动,不能确定是内环影响还是外环影响。
- 调节内环PID
对应操作:将内环除了P以外的数据清零。然后将P给大,握住转子延申处结构(比如:调节车的yaw和pitch轴时,握住枪管;调节拨弹轮时,抓住拨盘)感受电机状态。直至轻轻拨动电机时能感受到一点将要轻微抖动的迹象(但没有真正剧烈抖动)。根据实际需求可以选择加一点点D使其更稳定。
再调外环
-
先把output limit放大。
-
根据经验给点P,直至用手拨拨不动并且抖得不太过分。
-
加D直至抖动几乎消除。
Vofa
Vofa使用方法详见Vofa
如果你很幸运,调的电机可以用把脉方式先粗调。
那经验告诉我们需要注意的点有:
- 把output limit调小至波形图常见极大值,防止过度变疯。
- 微调一下P和D
(欢迎补充)
最好的情况大概如图:
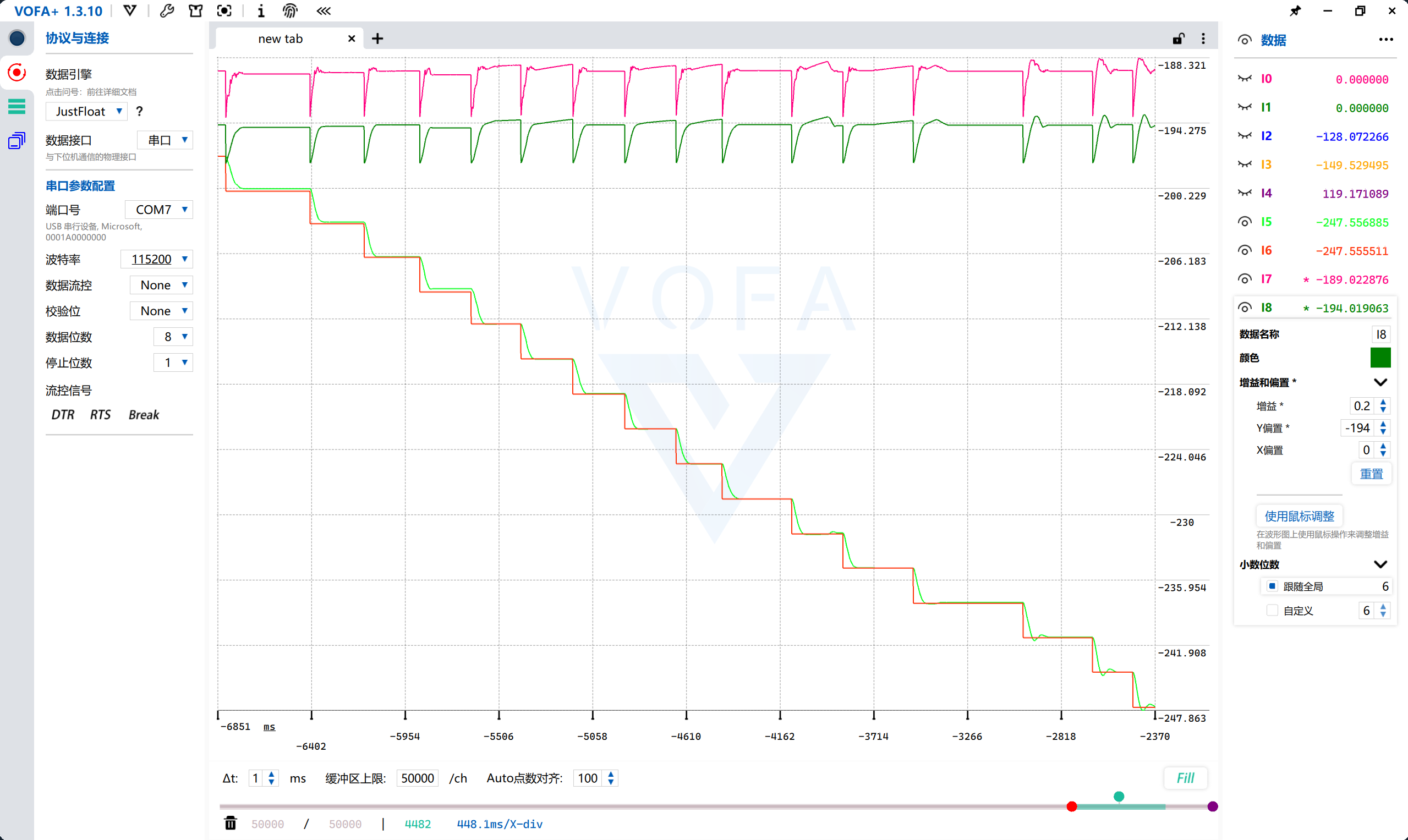
如果很不巧,你只能使用vofa调参
建议先复用前辈的PID,然后开vofa细调。
分别打开速度环和位置环的曲线情况,对比实际值和目标值。看谁的数据先出现异常。根据PID原理进行调参。(笔者在这一块经验很充足,期待优秀的男神vofa大师曹汇东学长的补全🌹🌹🌹)